



 图文亮点
图文亮点
仿生锦鲤是由北京大学智能仿生设计实验室研发的仿鲹科三关节机器鱼。

图 1
机器鱼总体结构主要分为鱼头、鱼身和鱼尾三个部分。鱼头部分由控制电路板、电池、通讯模块、电源开关和胸鳍构成,鱼头上预留了打气孔、充电头。鱼身部分由三个摆动关节串联构成,鱼体表面被一层橡胶皮套包裹,起到防水的作用,在必要的时候,需要给机器鱼的内部充气以保证机器鱼有足够的浮力,开关位于橡胶皮套内部。
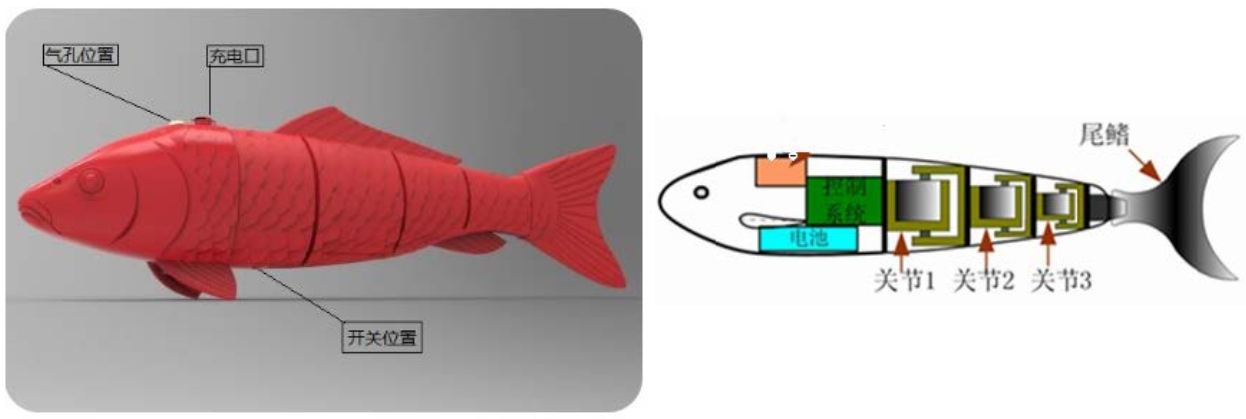
图 2
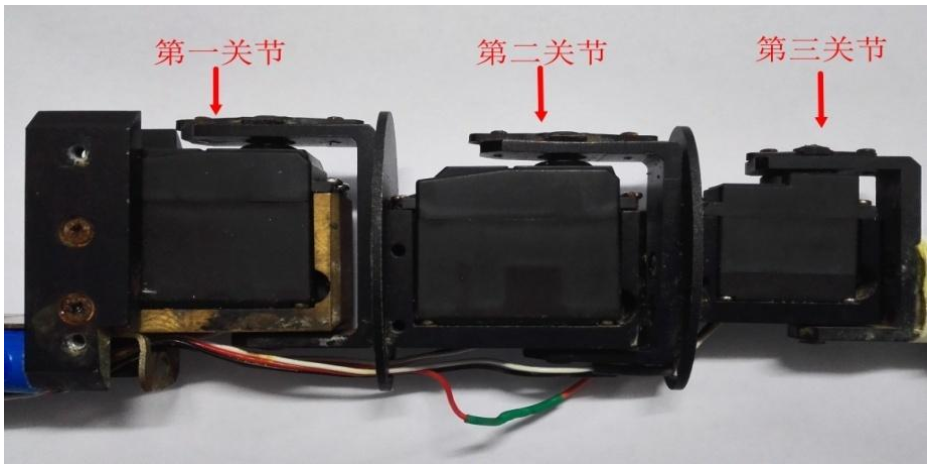
图3
控制机器鱼游动的平台包括摄像头、水池、电脑、发射模块、机器鱼、操作软件等。摄像头采集图像(鱼和球的坐标),然后通过大平台进行处理,同时给平台加载策略,最后通过USB模块发送到机器鱼,机器鱼接收到命令后执行相应的动作。
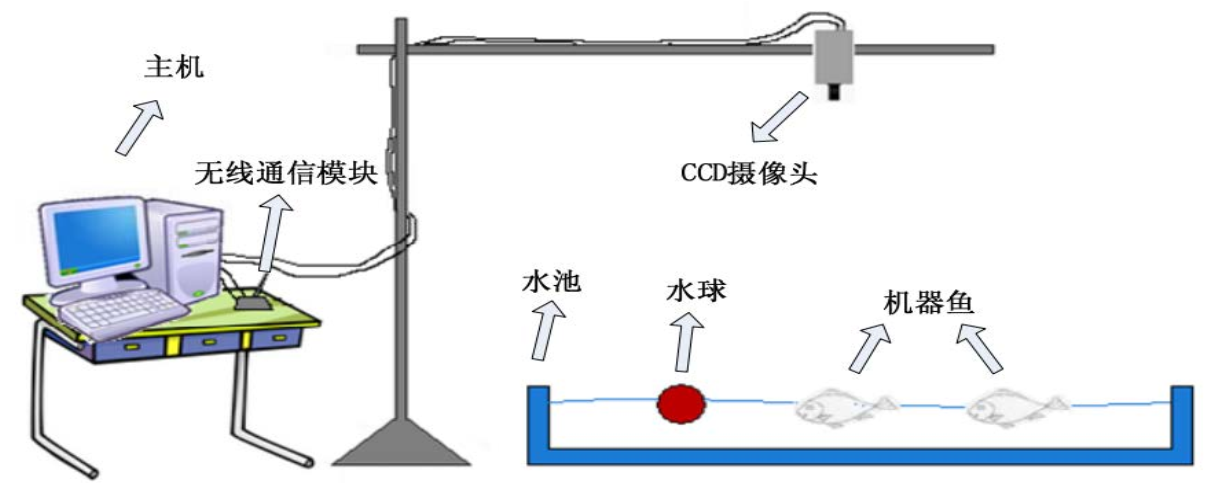
图4