
 科研方向
科研方向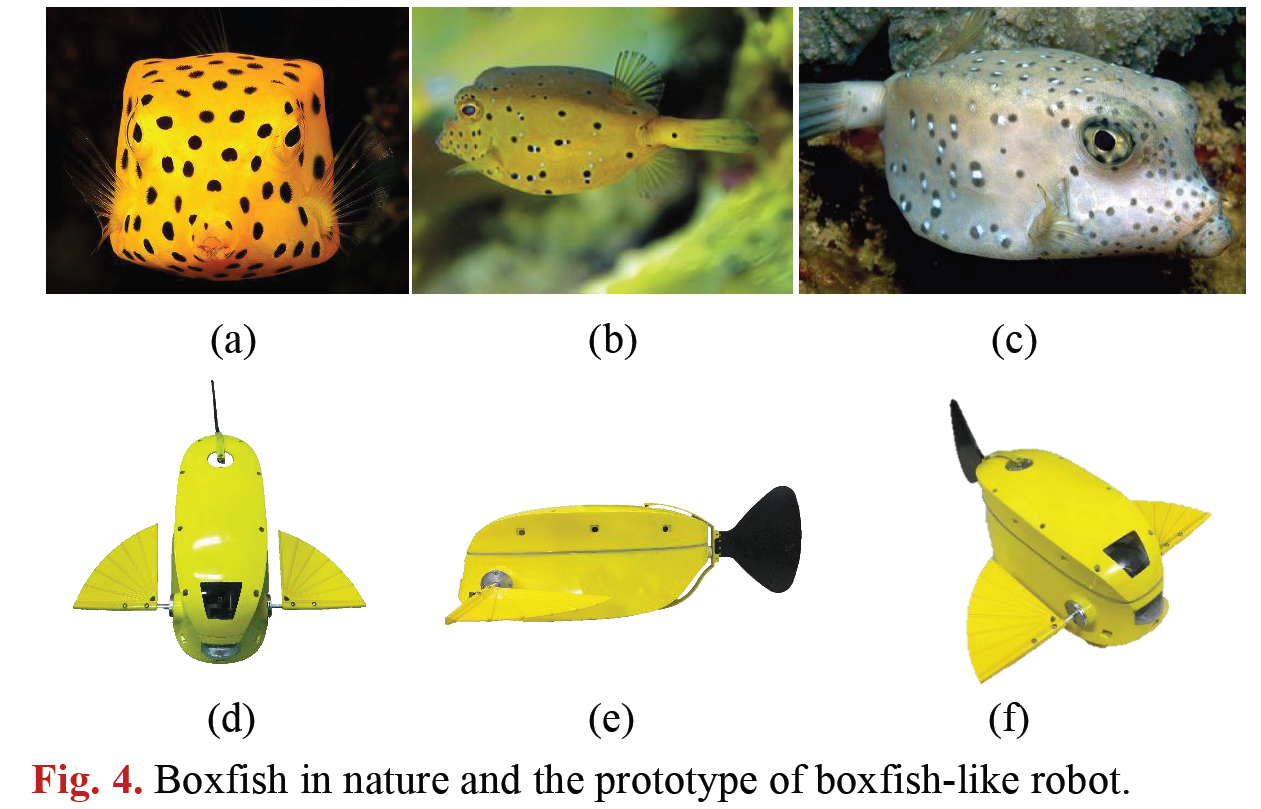
水下仿生机器人 Biomimetic Underwater Robots
自然界中的生物通过上亿年的演化,展现出了完美的身体结构和非凡的运动特性。生物趋于完美的特性,吸引了那些希望设计出更好的机器人的学者们的关注。受自然界中水生生物的启发,我们设计各种各样的仿生水下机器人。
共融机器人 Tri-Co Robots
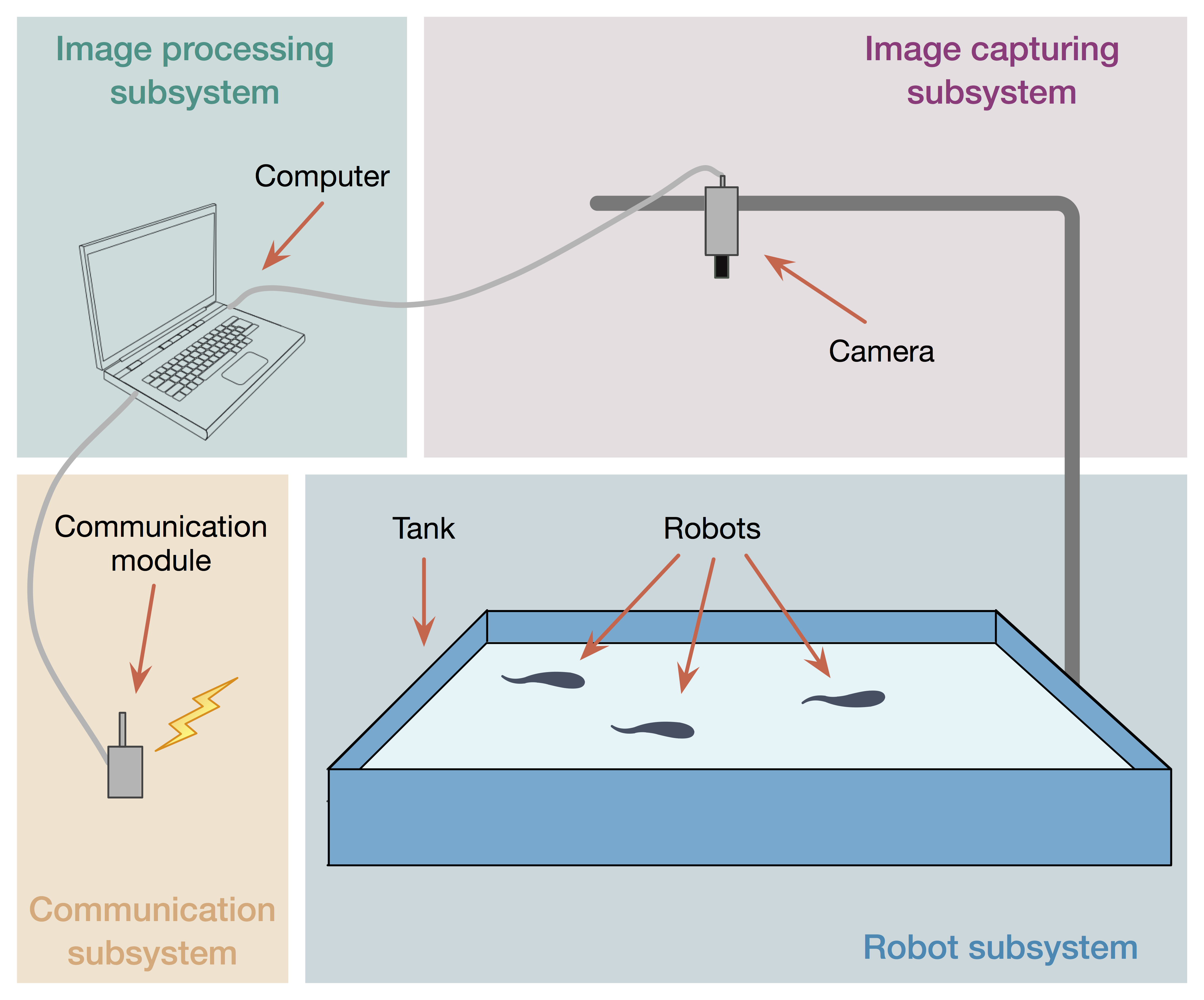
共融机器人是指能与作业环境、人和其它机器人自然交互、自主适应复杂动态环境并协同作业的机器人。多共融机器人的协同作业技术具有巨大应用价值,群体协作控制机制与方法是其重要理论基础和关键技术。我们研究融合多智能体和合作演化动力学的智能群体控制理论,并针对多水下机器人协作展开实验研究。
水下仿生感知 Biomimetic Underwater Sensing
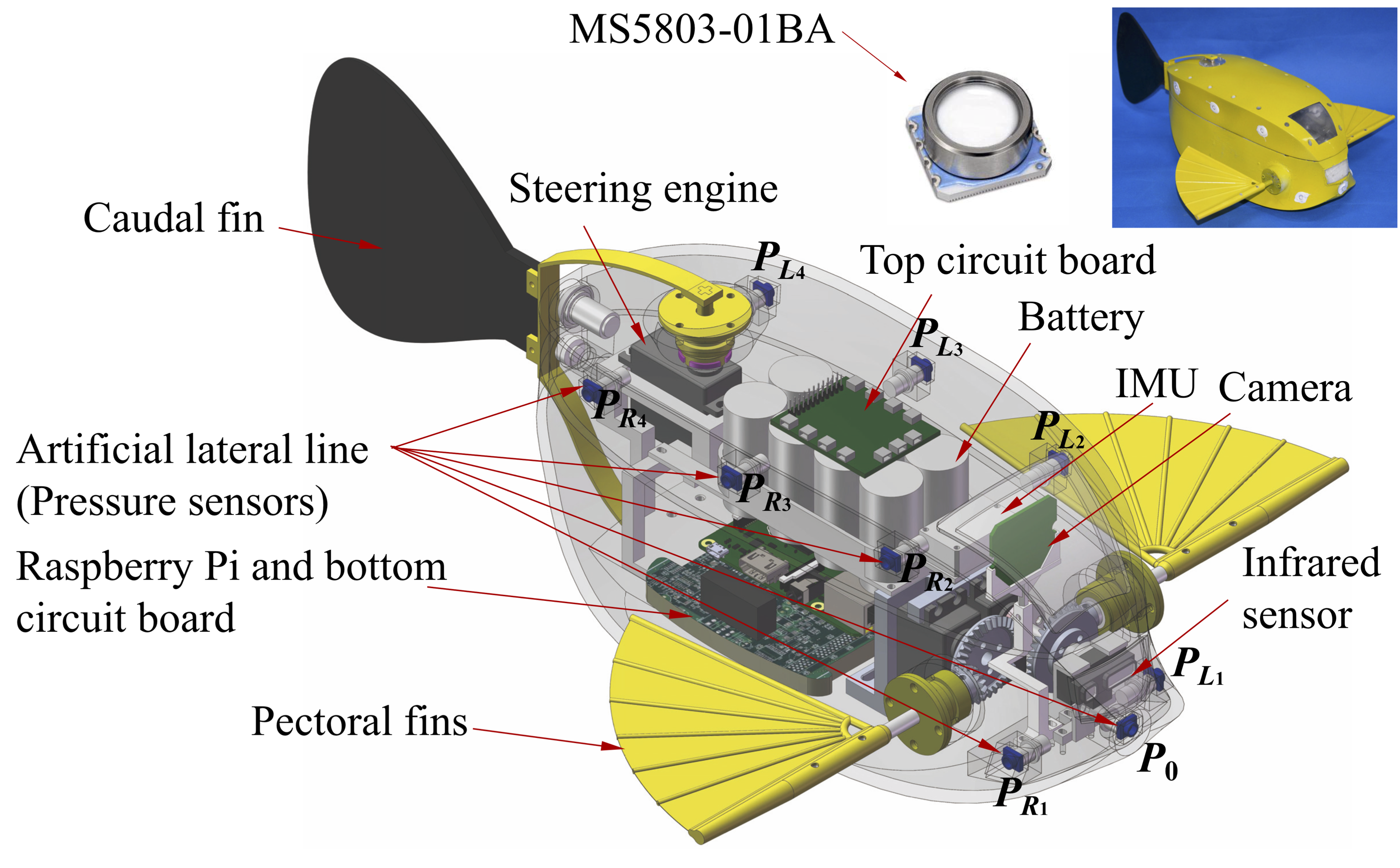
鱼类利用侧线可以有效地感知周围的水环境信息。基于这一生物学现象,我们探究机器鱼如何利用搭载的人工侧线系统去感知邻居机器鱼运动产生的类反卡门涡街,从而感知邻居机器鱼的摆动状态和自身相对邻居机器鱼的相对姿态信息。我们正在将这一研究应用于多机器鱼的编队控制。
多智能体系统 Multi-agent Systems
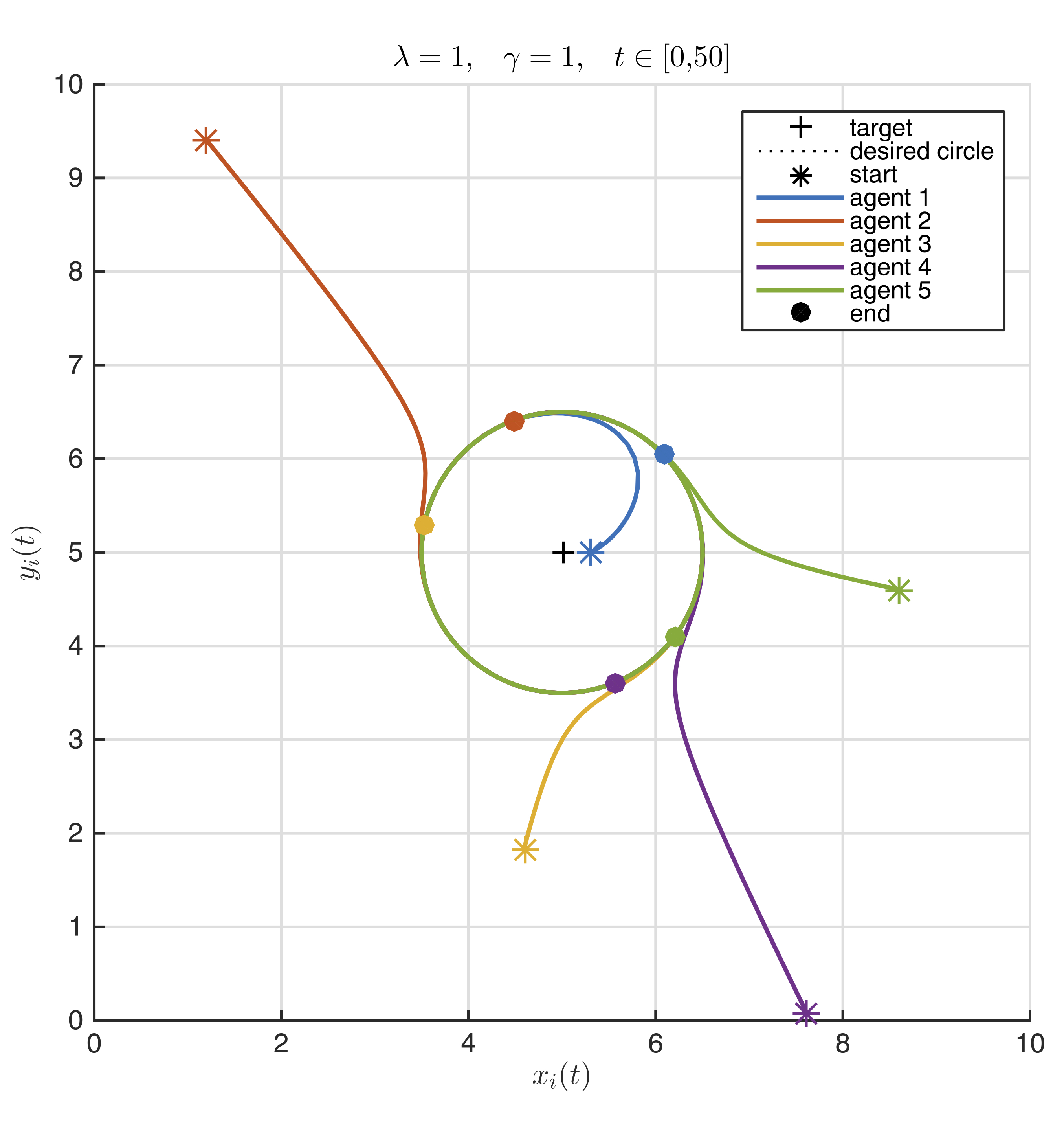
多智能体系统协同技术的相关研究是控制领域的前沿方向。它是由一定数量的自主个体通过相互合作和自组织,在集体层面呈现出有序的协同运动和行为。当前,我们主要采用事件驱动机制、控制理论、图论、博弈论、强化学习等方法研究多智能体系统的协同控制。

水下电场通信 Underwater electrocommunication
在水下机器人的研究中,通信是一个非常重要的议题。受到自然界弱电鱼类可以主动发射和感知电场实现水下感知通信的启发,我们开发了一种稳定、功耗低和环境适应性强的近距离水下电场通信方法。我们实验室致力于开发、升级基于水下电场通信的嵌入式系统,并实际运用至水下机器人上,达成基于电场的水下机器人通信、组网、定位、导航等功能。
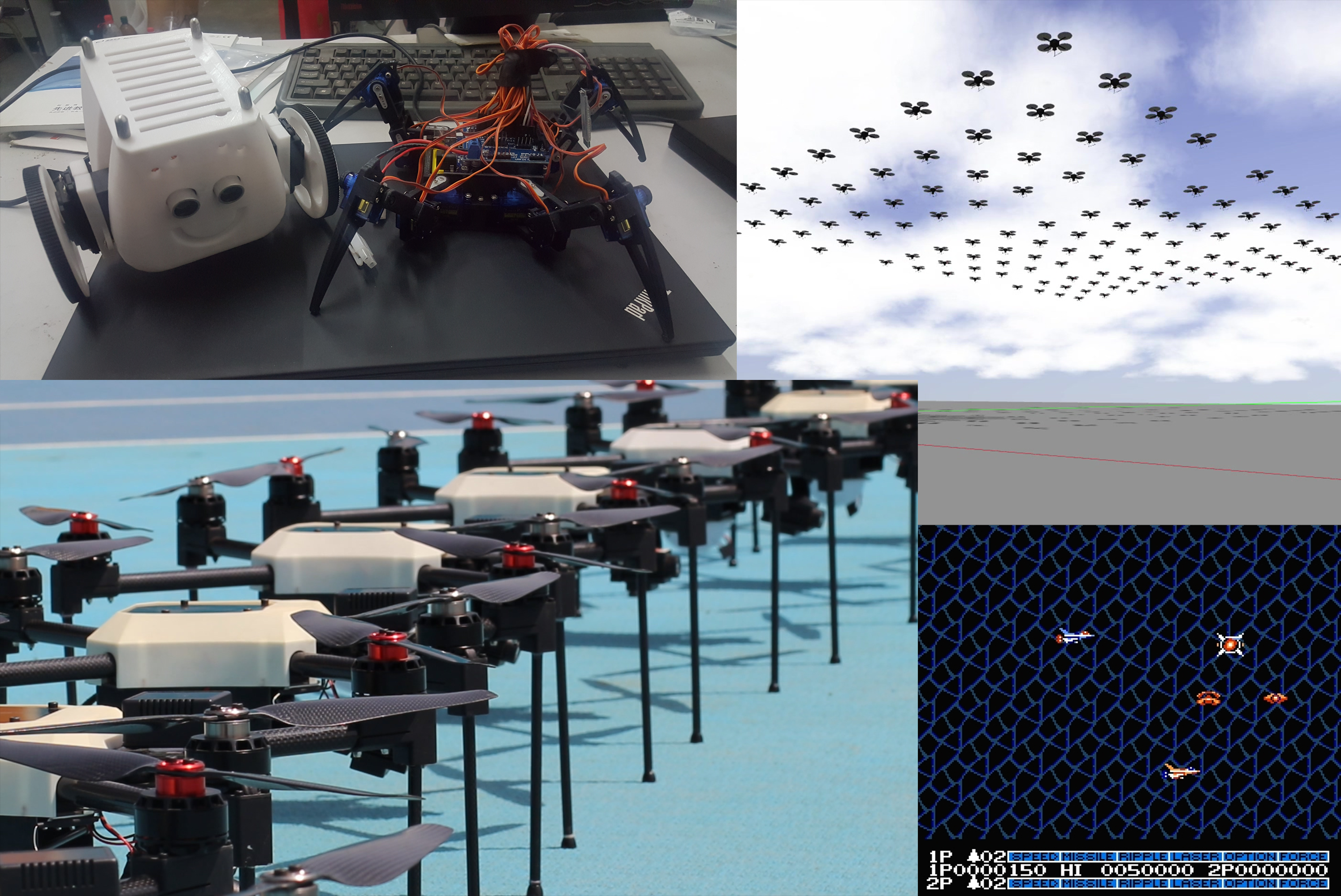
无人机集群控制 Drone Swarm Intelligence
我们正在基于多智能体强化学习开发异构机器人集群平台。目前,我们基于实验室现有的仿生机器人构建异构机器人集群平台,智能体机器人单元包含多关节仿生机器鱼、四旋翼飞行器、水面母船、陆地小车及四足机器人。使用上述平台基于强化学习研究不同种类个体的集群行为。

仿生电子学 Bioelectronics
仿生电子学,以电子器件实现生物功能为导向,通过器件的设计和制作,实现其特定功能,例如物质传感,信号传输等。研究领域高度融合各种仿生材料及电子材料以制造仿生电子传感器件,包括材料选择、结构加工、器件制造、系统组成、及电信号测量的研究。


