科研方向
科研方向
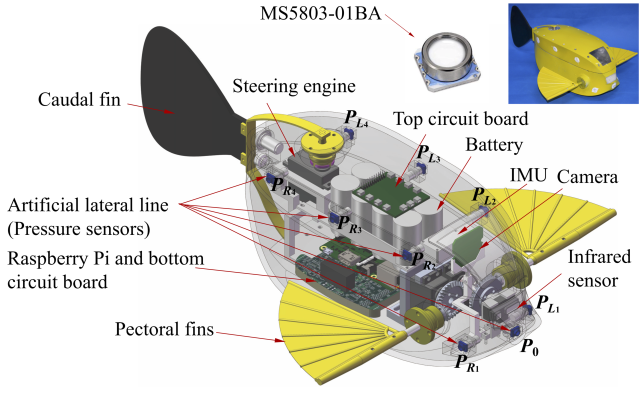
鱼类利用侧线可以有效地感知周围的水环境信息。基于这一生物学现象,我们探究机器鱼如何利用搭载的人工侧线系统去感知邻居机器鱼运动产生的类反卡门涡街,从而感知邻居机器鱼的摆动状态和自身相对邻居机器鱼的相对姿态信息。我们正在将这一研究应用于多机器鱼的编队控制。
Lateral line system is a mechanoreceptive organ system which provides fish with flow-relative information. Inspired by this typical biological phenomenon, we study how a robotic fish uses its onboard artificial lateral line system (ALLS) to sense the Kármán vortex street-like vortex wake generated by its adjacent robotic fish, thus sensing its relative position and attitude to its neighbor, and the oscillating state of its neighbor. We are working on applying such a mechanism to formation control of a robotic fish group.