



 科研方向
科研方向
代表性论文(Selected Publications)
全部论文列表: Google Scholar
2017
-
01
Wang, Chen, Xie, Guangming* (2017).
Automatic Control, IEEE Transactions on, 62(12), 6560-6567.
-
02
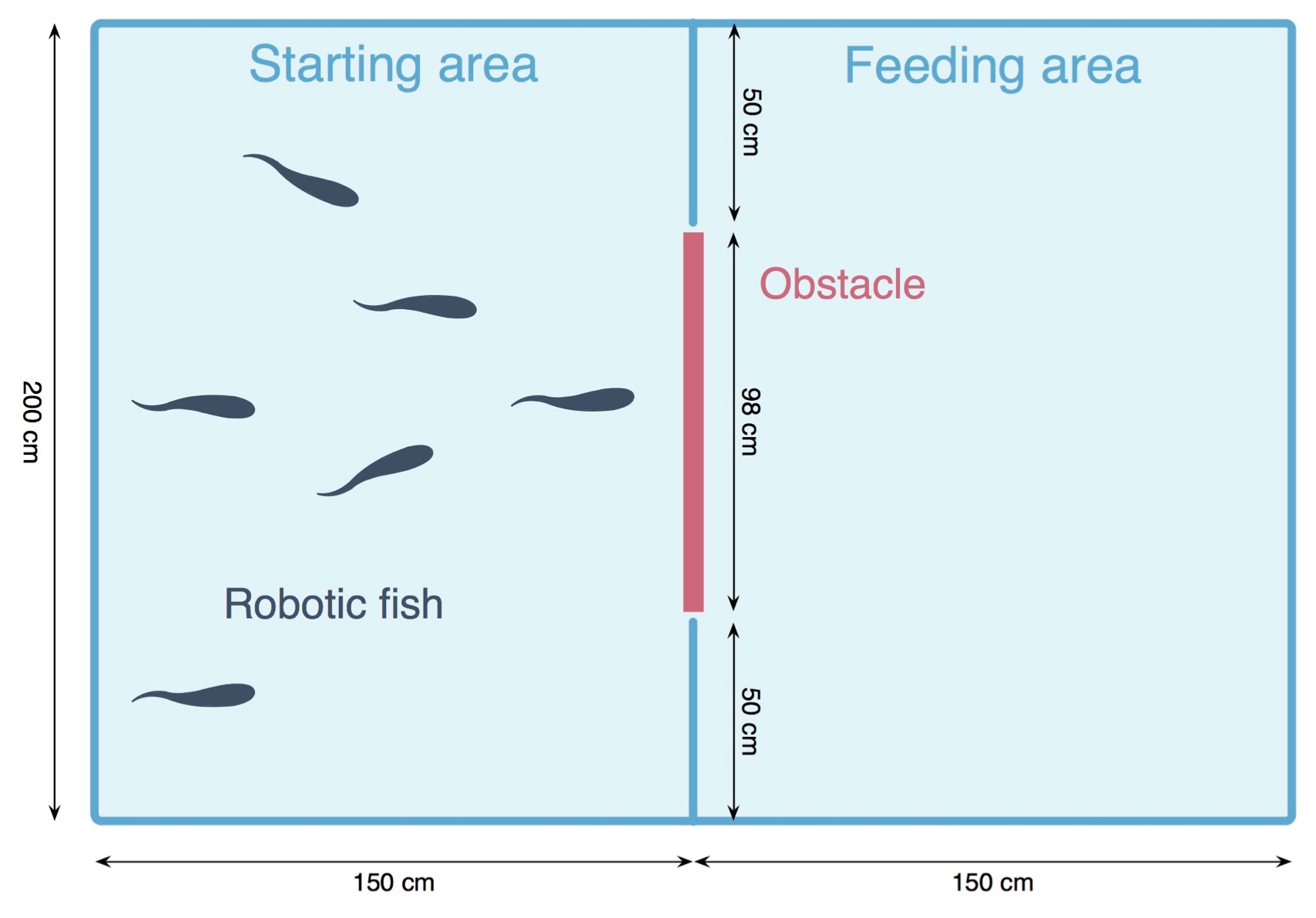
Wang, Chen*, Chen, Xiaojie, Xie, Guangming, Cao, Ming* (2017).
Emergence of leadership in a robotic fish group under diverging individual personality traits.
Royal Society Open Science, 4: 161015.
-
03
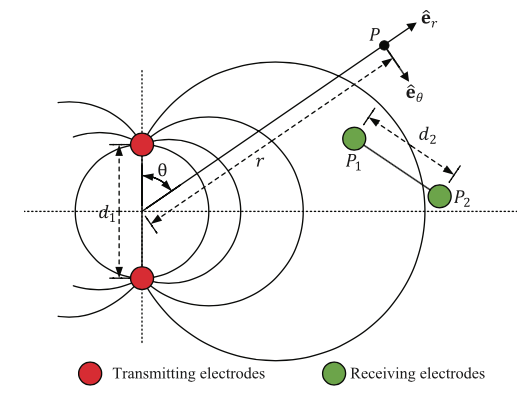
Wang, Wei, Liu, Jindong, Xie, Guangming*, Wen, Li, Zhang, Jun (2017).
A bio-inspired electrocommunication system for small underwater robots.
Bioinspiration & biomimetics, 12(3), 036002.
-
04
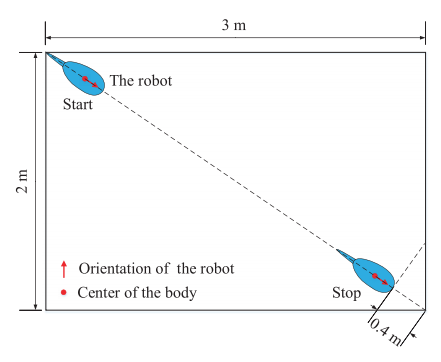
Wang, Wei, Gu, Dongbing, Xie, Guangming* (2017).
Autonomous Optimization of Swimming Gait in a Fish Robot With Multiple Onboard Sensors.
IEEE Transactions on Systems, Man, and Cybernetics: Systems.
-
05
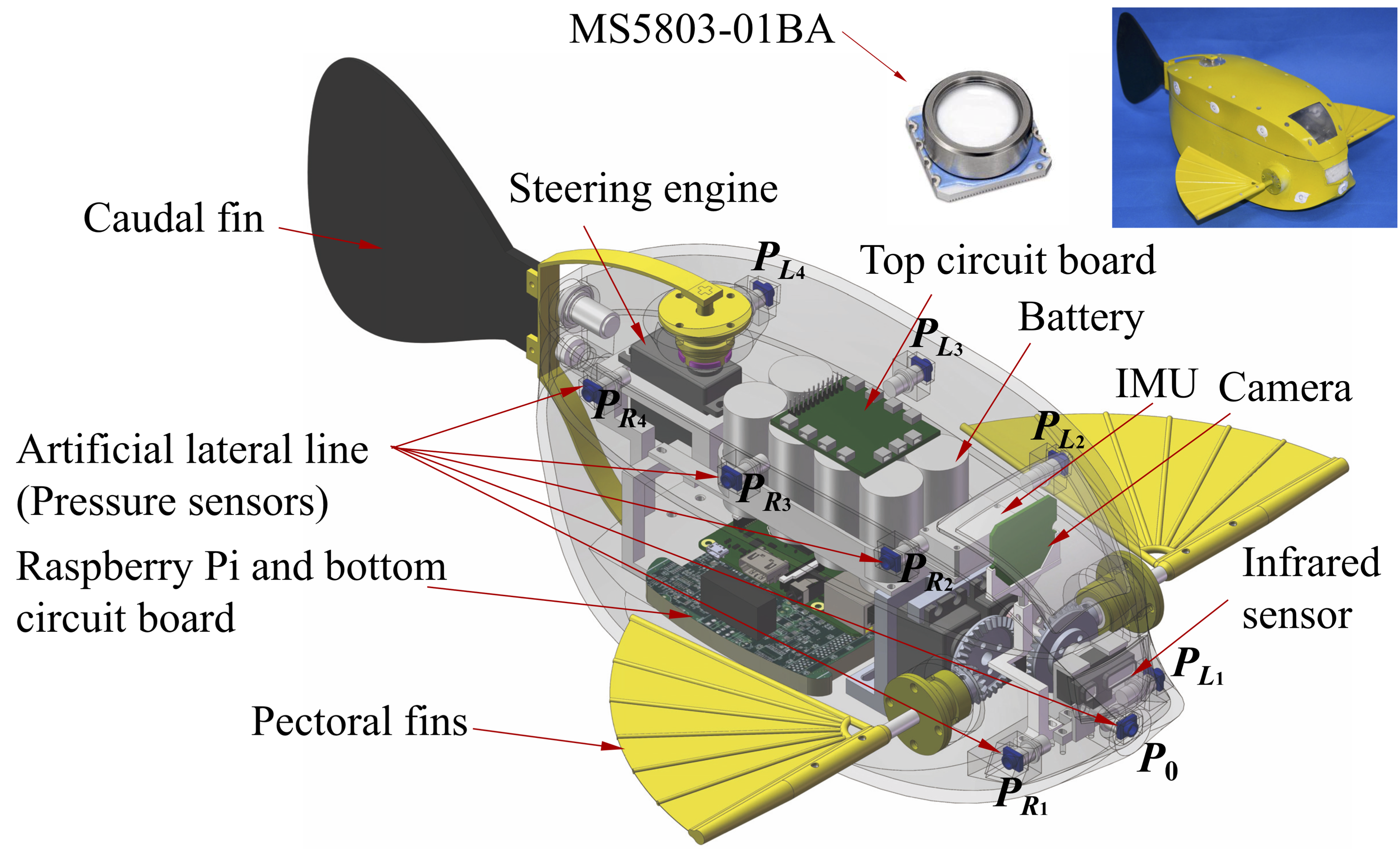
Zheng, Xingwen, Wang, Chen, Fan, Ruifeng, Xie, Guangming* (2017).
Artificial lateral line based local sensing between two adjacent robotic fish.
Bioinspiration & Biomimetics, 13(1), 016002.
2016
-
01
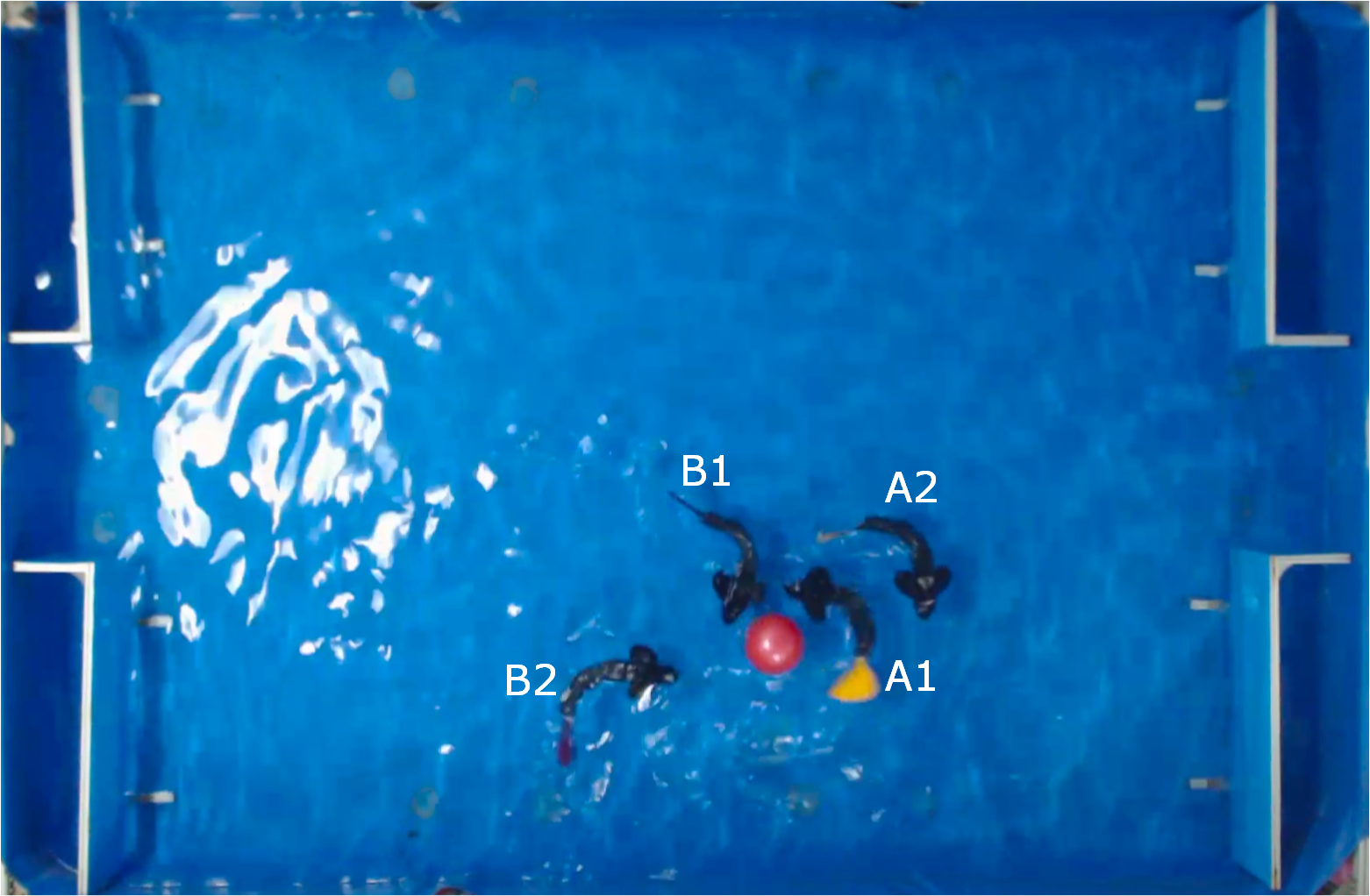
Yu, Junzhi*, Wang, Chen, Xie, Guangming (2016).
Coordination of multiple robotic fish with applications to underwater robot competition.
Industrial Electronics, IEEE Transactions on, 63(2), 1280-1288.
2015
-
01
Xie, Guangming*, Wang, Long, Hu, Yonghui (2015).
Multiple Autonomous Robotic Fish Collaboration.
In Robot Fish (pp. 315-357). Springer, Berlin, Heidelberg.
-
02
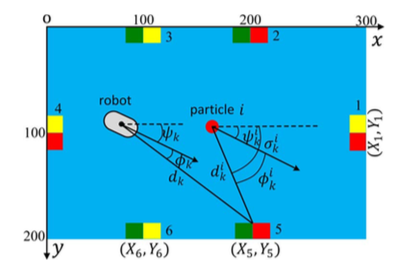
Wang, Wei, Xie, Guangming* (2015).
Online high-precision probabilistic localization of robotic fish using visual and inertial cues.
IEEE Transactions on Industrial Electronics, 62(2), 1113-1124.
-
03
Zhang, Yanling, Fu, Feng, Chen, Xiaojie, Xie, Guangming*, Wang, Long (2015).
Cooperation in group-structured populations with two layers of interactions.
Scientific reports, 5, 17446.
2014
-
01
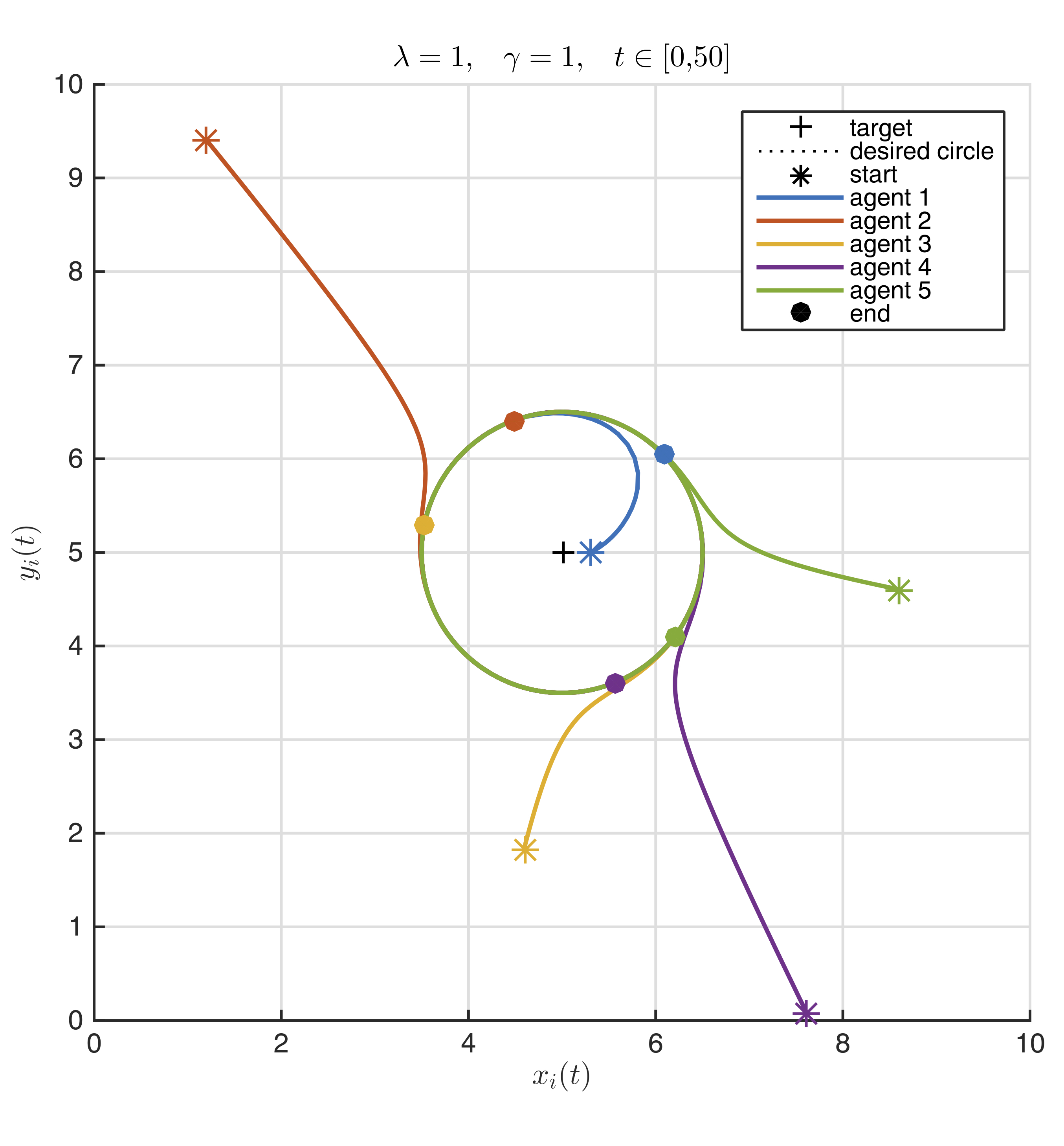
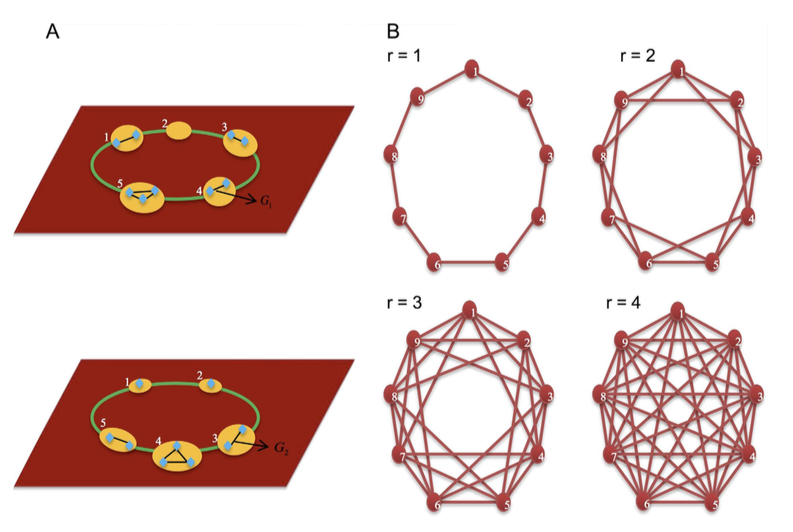
Wang, Chen, Xie, Guangming*, Cao, Ming (2014).
Controlling anonymous mobile agents with unidirectional locomotion to form formations on a circle.
Automatica, 50(4), 1100-1108. (Regular paper).
2013
-
01
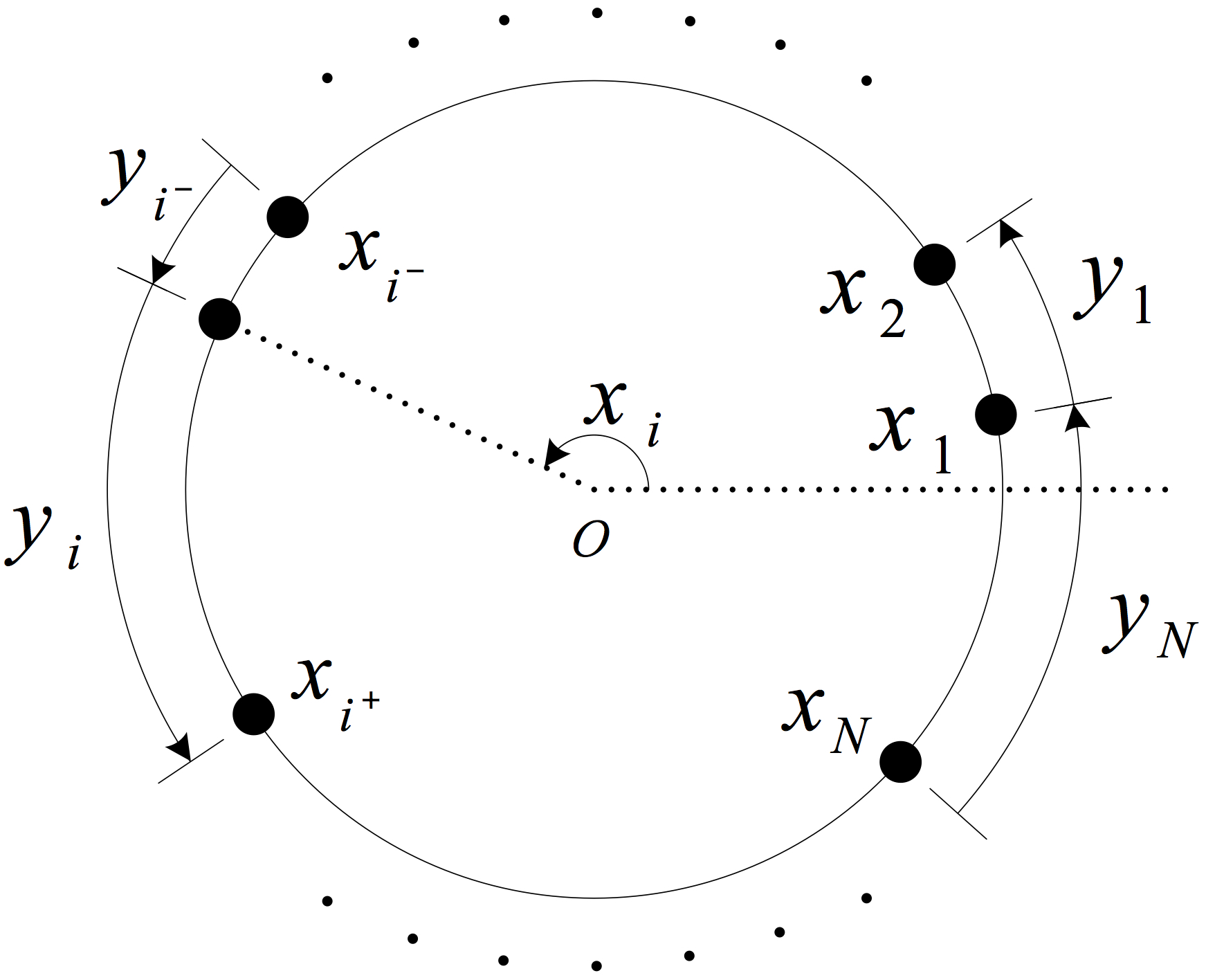
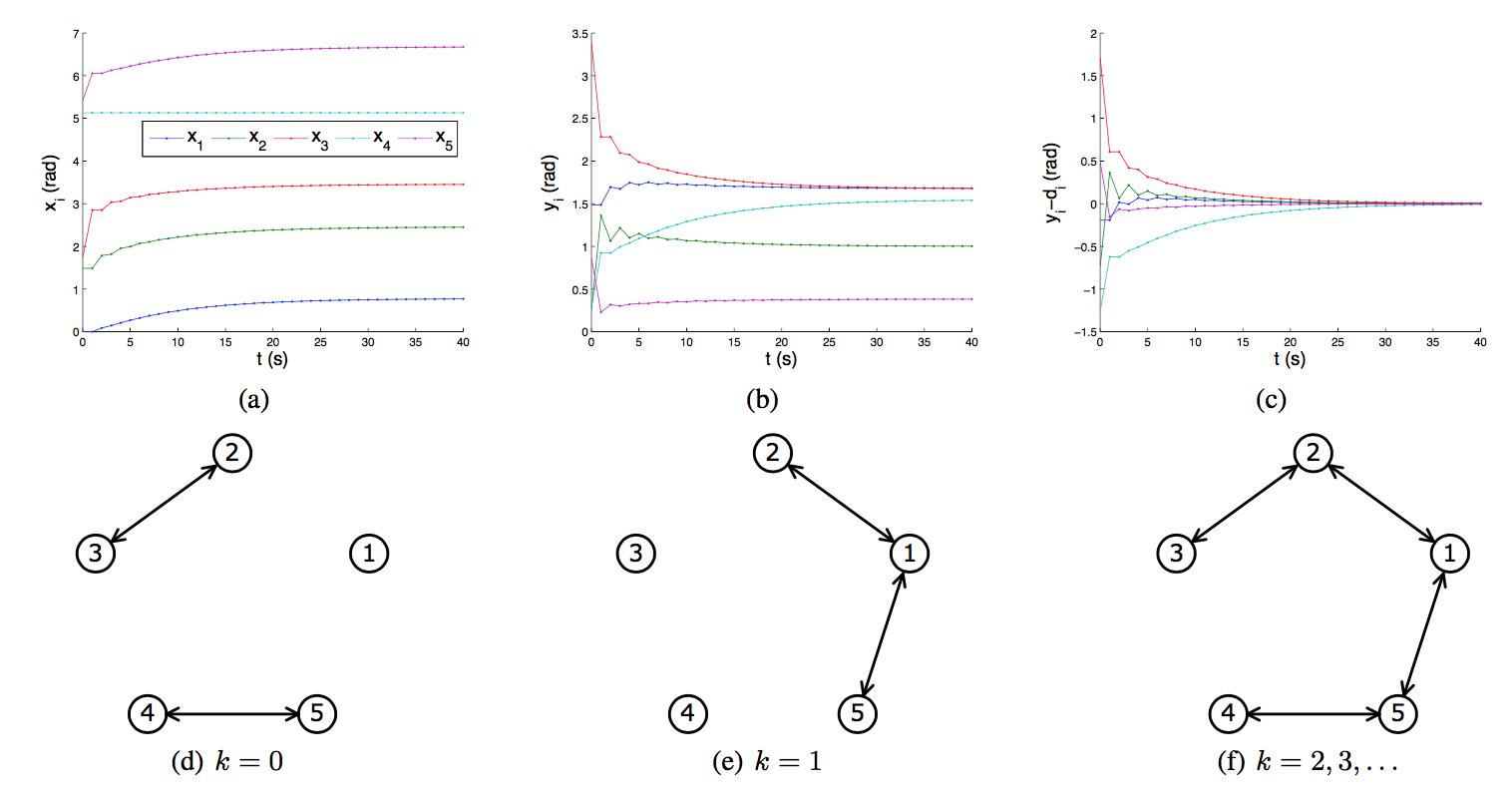
Wang, Chen, Xie, Guangming*, Cao, Ming (2013).
Forming circle formations of anonymous mobile agents with order preservation.
Automatic Control, IEEE Transactions on, 58(12), 3248-3254.
-
02
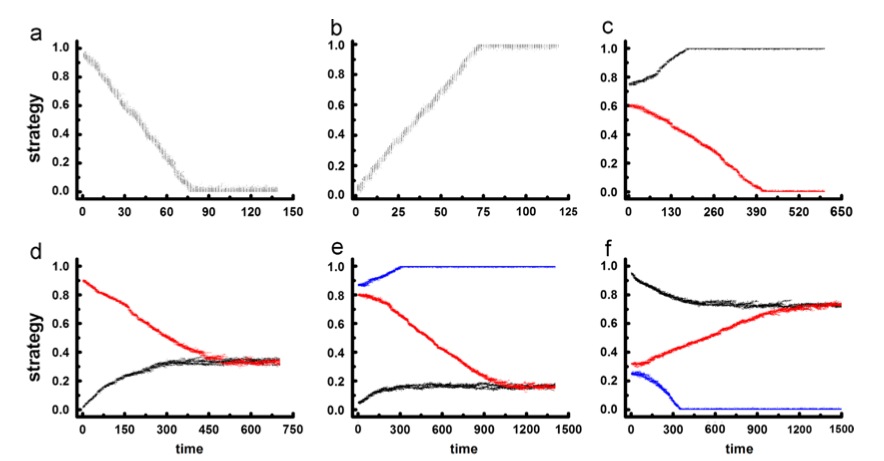
Zhang, Yanling*, Wu, Te, Chen, Xiaojie, Xie, Guangming*, Wang, Long (2013).
Mixed strategy under generalized public goods games.
Journal of theoretical biology, 334, 52-60.
2012
-
01
Liu, Kaien*, Xie, Guangming*, Wang, Long (2012).
International Journal of Robust and Nonlinear Control, 22(17), 1881-1898.
-
02

Liu, Huiyang, Xie, Guangming*, Wang, Long (2012).
Necessary and sufficient conditions for containment control of networked multi-agent systems.
Automatica, 48(7), 1415-1422.
2011
-
01
Wang, Chen, Xie, Guangming*, Wang, Long, Cao, Ming (2011).
International Journal of Innovative Computing Information and Control, 7(7B), 4237-4249.