



 图文亮点
图文亮点
摘要:
箱魨是一种具备箱状外形的鱼类。与常见的鱼类不同,它不具备流线型的外观,身体的主体呈现棱形,且棱形边缘具备轮廓分明的脊骨。它的背部和底部的外表面向外凸出,侧边的外表面向内凹陷。这样的外观特征使得箱魨鱼具备良好的机动性和稳定性。仿生箱魨受一种名为Ostracion cubicus的箱魨鱼启发而设计,并被应用于水下机器人运动控制、感知、通信、定位等研究。
正文:
图1展示的是仿生箱魨的尺寸和硬件配置信息。仿生箱魨的长、宽、高尺寸分别是40厘米、14.1厘米,以及13.2厘米。它主要包括一个密封外壳,一对胸鳍,以及一个尾鳍。壳体分为上下两部分,上壳体由塑料制成,下壳体由铝制成。鳍肢主要参考了真实鱼鳍的形状制成。O型密封圈用于保证壳体间的密封,动密封圈用于保证转动轴处的密封。仿生箱魨的密度经过调整,略小于水的密度,使得它能够悬浮在水面上。
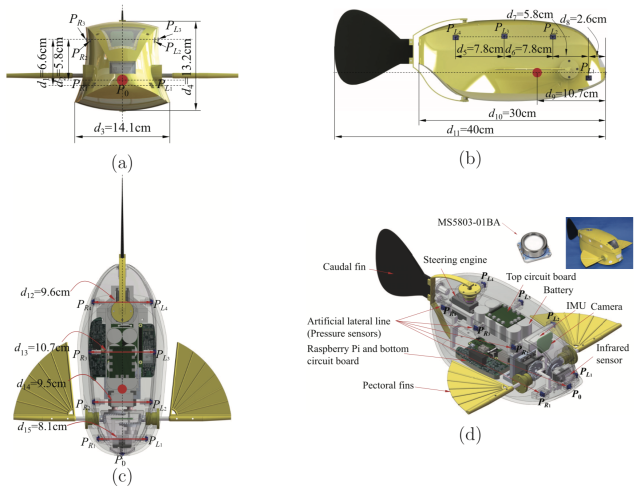
图1 仿箱魨机器鱼的尺寸和硬件配置. (a) 正视图;(b) 侧视图;(c) 俯视图;(d) 轴测图
在壳体的内部安置有由电池、舵机、电路板,以及多种传感器等组成的电气系统。图2所示是电气系统的构成。感知单元用于获取一系列的传感器数据,并将数据通过IIC协议发送给处理器。处理器根据这些数据信息,分析出周围的水环境信息和机器鱼的运动状态信息。而后,发送相关的控制指令给控制单元,用于控制与鳍肢相连的舵机,产生推进力。
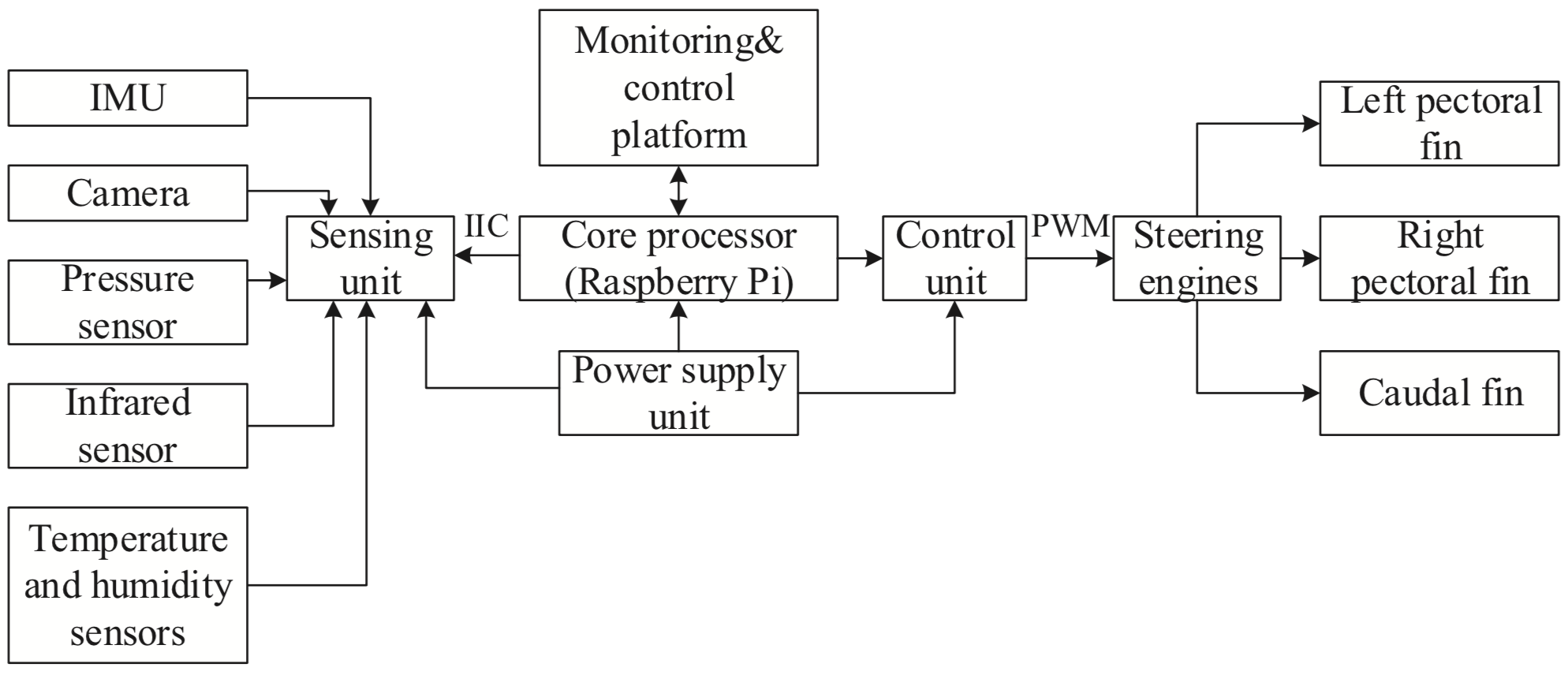
图2 仿箱魨机器鱼的电气系统
具体地,一种基于CPG的控制器被用于控制鳍肢的摆动。通过设定特定的CPG参数,机器鱼的鳍肢将会以特定的幅度、频率,以及偏置进行摆动。在鳍肢所产生的推进力的作用下,机器鱼将会实现多种三维运动模式,包括:直游/倒游,左转/右转,上升/下潜,偏航、俯仰,以及翻滚运动,如图3所示。
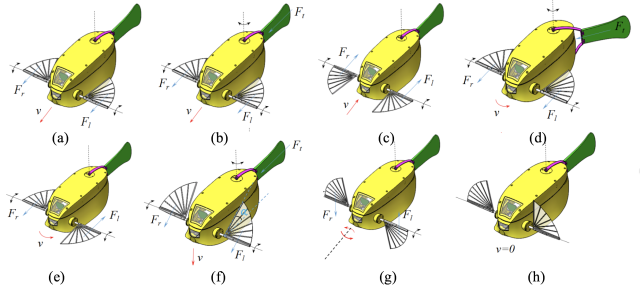
图3 仿箱魨机器鱼的运动模态. (a) 直游 (MPF模式);(b) 直游 (BCF+MPF模式);(c) 倒游;(d) 行进中转弯;(e) 转弯运动 (MPF模式);(f) 上升下潜运动;(g) 翻滚运动;(h) 悬停
传感器主要包括惯性导航模块、摄像头、红外传感器,以及压强传感器。惯性导航模块、摄像头,以及红外传感器安置于机器鱼内部的正前方。惯性导航模块用于提供机器鱼的加速度和姿态信息,从而观测机器鱼的三维运动。摄像头和红外传感器用于捕获周围的图像信息,从而躲避障碍物并确定自身的位置。压强传感器分布在机器鱼的外表面,用于搭建人工侧线系统,并捕获鱼体周围的压强信息。两块电路板上的多个STM32用于实现对传感器信息的获取和对机器鱼运动的控制。顶部电路板主要用于实现对压传数据的采集。底部电路板主要用于实现对舵机运动的控制,和对摄像头、红外传感器,以及惯性导航模块的数据读取。除此之外,树莓派(Raspberry pi)作为主处理器,用于实现对机器鱼的自主控制。
为了便于对机器鱼的观测和控制,我们设计了一个如图4所示的上位机平台。该平台可以实现机器鱼的参数显示、参数调整,以及运动控制。它主要由五个部分组成。区域1是水下图像显示区;区域2是传感器数据显示区;区域3是网络连接区;区域4是运动控制区。
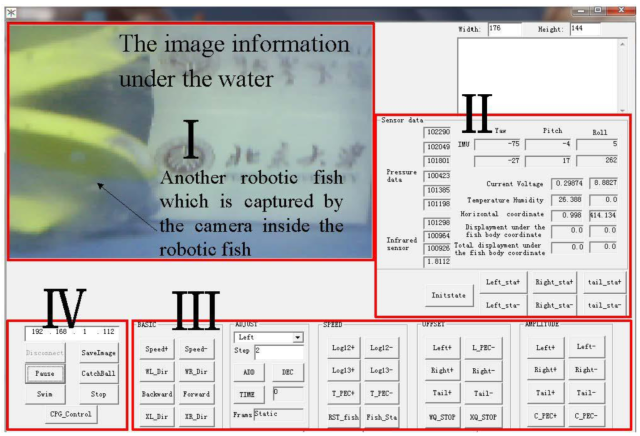
图4 机器鱼的上位机平台
水下图像显示区:搭载于机器鱼上的摄像头可以用于捕获水下图像。当机器鱼通信连通时,图像信息可以通过Wi-Fi传输到上位机,并在区域1中进行显示。
传感器数据显示区:本区域主要用于显示红外传感器、压强传感器、惯性导航模块,以及温湿度传感器等的数据。
网络连接区:本区域主要用于设定上位机的IP地址,并让其与机器鱼的IP地址相同,从而实现上位机和机器鱼之间的数据通信。此外,本区域还有一些用于控制机器鱼运动的按钮。
运动控制区:本区域集中了对机器鱼鳍肢摆动参数进行调节的按钮,可用于实现对机器鱼运动的控制。
基于仿生箱魨,本课题组开展了仿生侧线感知、仿生电场通信、水下机器人自主定位、机器鱼自主游动步态优化等研究。代表性的成果,请参考文献[1]-[5]。

图5 水下定位研究示意图
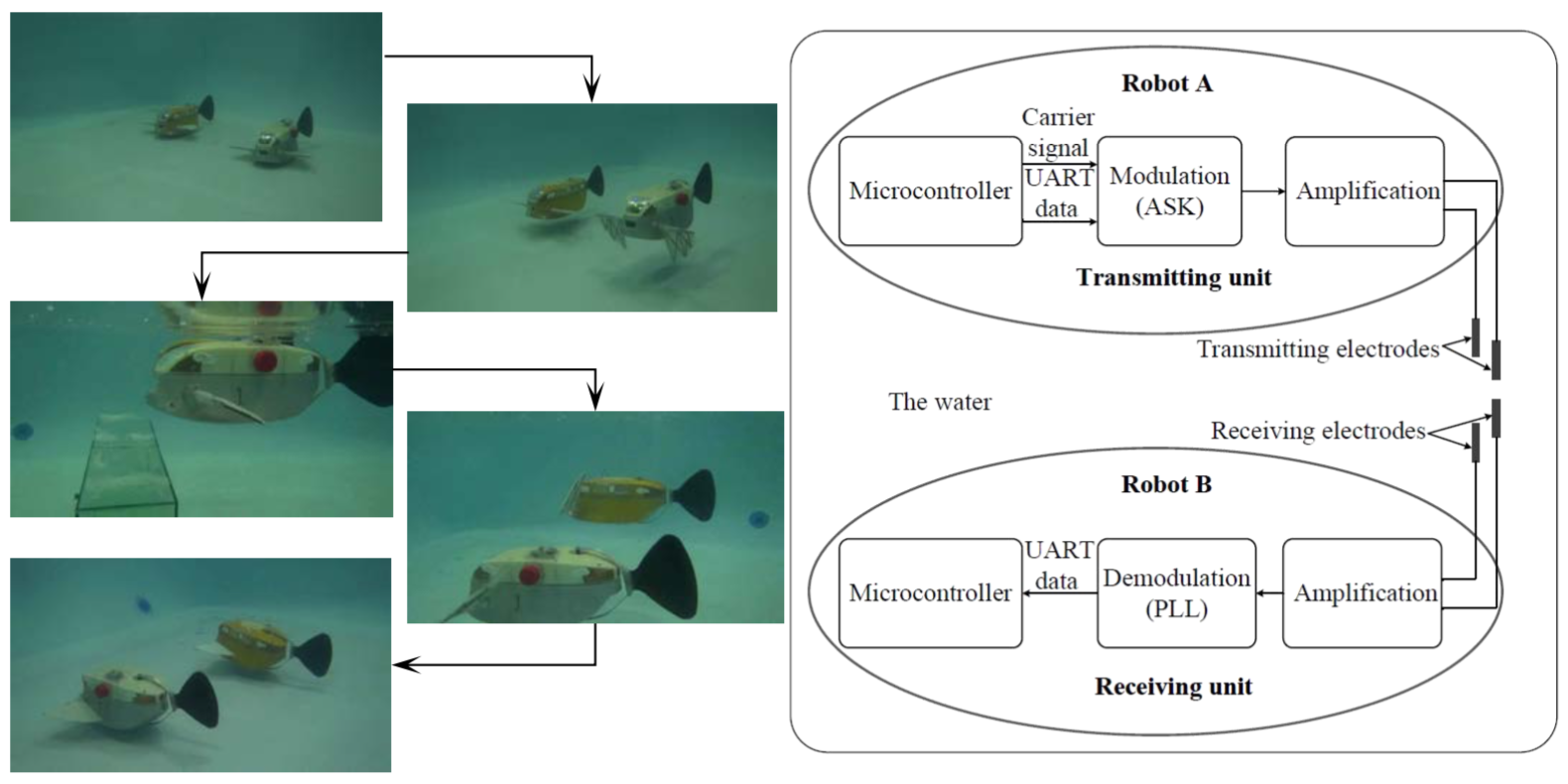
图6 电场通信研究示意图
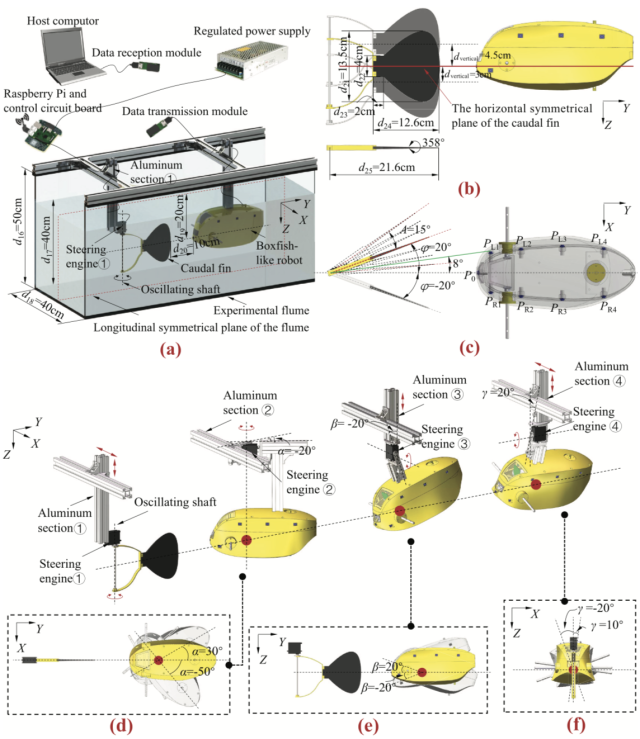
图7 仿生侧线感知研究示意图
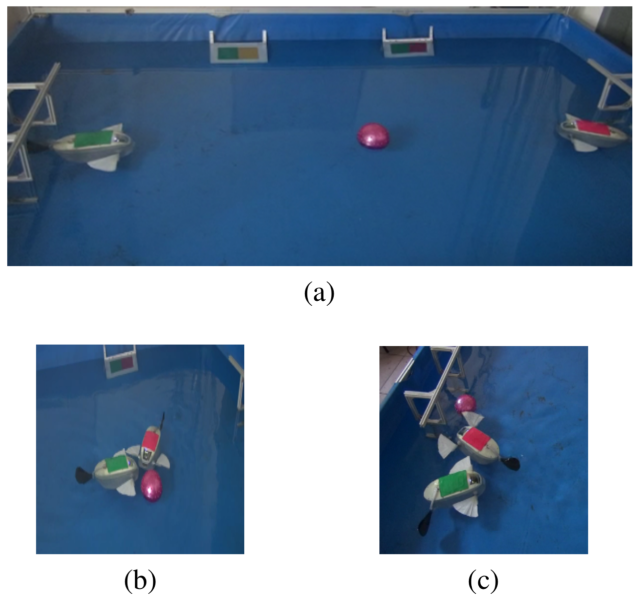
图8 自主视觉机器鱼比赛示意图. (a) 比赛开始;(b) 争球;(c) 得分
参考文献
[1] Xingwen Zheng, Chen Wang, Ruifeng Fan, and Guangming Xie* , “Artificial lateral line based local sensing between two adjacent robotic fish”, Bioinspiration & Biomimetics, 13, 016002, 2018.
[2] Wei Wang, Jindong Liu, Guangming Xie*, Li Wen, and Jianwei Zhang, “A Bio-inspired Electrocommunication System for Small Underwater Robots”, Bioinspiration & Biomimetics, 12, 036002, 2017.
[3] Wei Wang, Dongbin Gu, and Guangming Xie*, “Autonomous Optimization of Swimming Gait in a Fish Robot with Multiple Onboard Sensors”, IEEE Transactions on Systems, Man and Cybernetics: Systems, 2017.
[4] Wei Wang, and Guangming Xie*, “Online High-Precision Probabilistic Localization of Robotic Fish Using Visual and Inertial Cues”, IEEE Transactions on Industrial Electronics. 62(2), pp. 1113-1124, 2015.
[5] Wei Wang, and Guangming Xie*, “CPG-based Locomotion Controller Design for a Boxfish-like Robot”, International Journal of Advanced Robotic Systems. 11(87), pp. 2014.