



 图文亮点
图文亮点
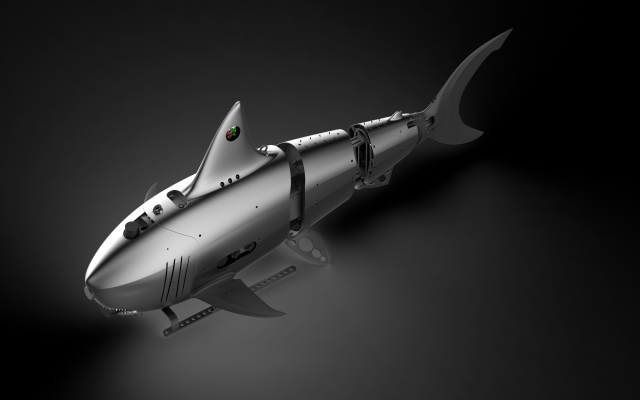
近日,北京大学工学院谢广明教授带领的科研团队成功研发出以鲨鱼为原型的仿生水下机器人——RoboShark,并成功下水完成系统集成测试。
RoboShark以鲹科鱼为设计原型,是国内第一代工业级水下仿生机器人。仿鲹科模式的水下推进器具备功耗较低、推进速度快、转向灵活等特点,可满足长航时、大范围的水下作业要求,成为水下潜航器领域的研究热点。该机器人采用三关节仿生尾鳍作为动力机构,利用反卡门涡街的驱动原理,提高能量利用效率的同时有效降低了运行噪声,适合长时间在水下潜伏、游弋;单独设计吸排水舱,通过吸排水实现自身重量的调节实现上浮下潜,运动控制更为灵活,可实现水下定深悬停,最大下潜深度可达300m;内部搭载通信模块,通过射频天线与地面基站进行通讯联系,最远控制距离可达3km。该机器人具有较大的承载能力,鱼体前端和非摆动部位两侧均搭载声呐单元及摄像模块,可实现目标检索、自主避障及海底地形地貌绘制等。
仿鱼水下推进技术对海洋考察、救生以及军事领域具有很高的应用价值。本项目对鲹科模式鱼类游动力学特性进行了基础理论研究,将整个鱼体分为本体及尾鳍两大部分,对本体部分进行水下行进阻力特性研究。将身体简化为具有流线形轮廓的回转体,以平板绕流模型的基本思想为出发点,推导了流线形体在层流和湍流两种流态下的摩擦阻力计算公式,在二维流场的条件下分别对卡克斯流线型,半椭圆和抛物线流线型以及双半椭圆流线型三种较具代表性的流线型轮廓进行了阻力特性研究,并通过对比分析得到了具有相对较好的行进阻力性能的流线型所应具备的轮廓特征;在此基础上,对两组变几何参数的流线形体进行了三维流场的行进阻力特性研究,通过对压差阻力,摩擦阻力,总阻力以及总阻力系数的分析,得到了形体轮廓几何参数的变化对行进阻力性能的影响。对尾鳍部分水动力特性研究包括:首先对尾鳍进行了运动参数的数学建模,应用动网格技术进行了尾鳍水动力的二维流场仿真研究,通过提取尾鳍推进力,侧向力以及转矩,计算了尾鳍的平均推进力以及平均推进效率,并在此基础上进一步探讨了变最大击水角度以及变相位差对水动力性能的影响。然后对尾鳍轮廓进行曲线拟合,并对其进行了三维流场的水动力特性研究,分析了尾鳍几何参数的变化对水动力性能的影响,最后根据流场的图像信息对尾鳍的水动力特性进行定性探讨。
本项目的研究对仿鲹科类水下机器人的研究工作奠定了理论基础,为后续研究工作的开展提供了一个实验模型。本项目已做出工程机,可根据实际需求进行定制化开发。主要性能参数如下:
1)续航能力:15天(滑翔推进)/8小时(尾鳍推进)
2)最大下潜深度:300m
3)导航:GPS、惯性导航
4)通信距离:开阔水域可达3km
5)最大巡游速度:1.5m/s,五级速度可调
6)最大负载能力:25kg