



 图文亮点
图文亮点
近期,工学院谢广明教授课题组在仿箱鲀机器鱼仿鱼类侧线感知研究中取得了新进展,相关论文于2020年2月20日在线发表于机器人领域顶级期刊IEEE Transactions on Robotics。
侧线系统是大多数鱼类和两栖动物类重要的感知器官,主要由一系列分布在鱼体周围的机械感受器——神经丘组成。这些神经丘包括分布在鱼体表面的表面神经丘和分布在骨状管壁内或鳞片形成的侧线管道内的管道神经丘两类。利用侧线系统,鱼类可以有效地感知周围水环境中的水动力学变化信息,并在鱼类的趋流、避障、捕食定位、集群等行为中起到重要的作用。近年来,随着机械、电子、材料及仿生科学的飞速发展,由不同类型的流场传感器阵列组成的人工侧线系统被逐渐地开发出来,并应用于水下机器人,尝试模拟鱼类侧线系统感知水流信息的功能,提高水下机器人对外部环境的感知能力。然而,实际上,人工侧线系统的应用一直是一个挑战,鲜有实际应用案例。
谢广明教授课题组是国内较早展开仿鱼类侧线感知研究的团队,强调以自然为师,向自然学习。该课题组利用传感器阵列搭建人工侧线并集成到机器鱼上,赋予机器鱼流场环境感知能力,以探究人工侧线系统在水下机器人上的实际应用。
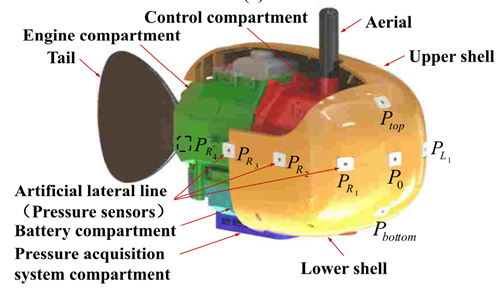
图1 集成人工侧线系统的箱鲀机器鱼
在该文章中,该课题组提出了一种基于人工侧线系统的机器鱼自主轨迹评估方法。首先,该课题组通过观察自然界中的箱鲀鱼形态及其侧线分布,并根据研究需要对其进行简化处理,研制了一款搭载有由压强传感器阵列组成的人工侧线系统的箱体机器鱼。而后,深入探究该箱鲀机器鱼的运动模态,并测取详细的运动参数信息,为后续的仿鱼类侧线感知实验中实验参数的确定提供参考信息。而后,该课题组提出了一个表征机器鱼在多模态运动过程中的动压变化的模型,该模型将人工侧线测取的动压变化量与机器鱼在多模态运动中的运动参数信息,包括:线速度、角速度、运动半径等关联起来。而后,基于该模型,通过侧线采集的动压变化量去估计机器鱼的运动参数。最后,基于估计的运动参数,设计算法去求解机器鱼的轨迹。
上述相关成果以长文 (Regular Paper) 的形式发表于机器人研究领域顶级期刊IEEE Transactions on Robotics (X. Zheng, W. Wang, M. Xiong, & G. Xie, “Online State Estimation of a Fin-Actuated Underwater Robot Using Artificial Lateral Line System”, 2020),论文链接:https://ieeexplore.ieee.org/document/9004516。
论文的通讯作者为谢广明教授,第一作者为课题组在读博士生郑兴文。上述研究得到了国家自然科学基金委重点项目、重大研究计划培育项目、面上项目 ,以及北京市自然科学基金委面上项目资助。合作单位包括美国麻省理工学院和博雅工道(北京)机器人科技有限公司。
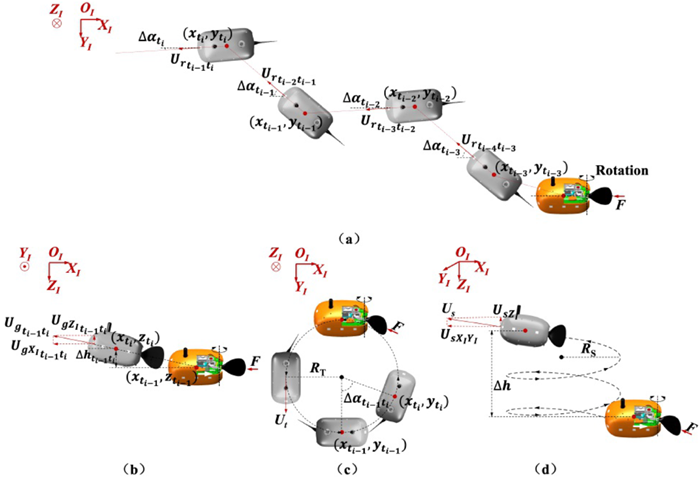
图2 基于人工侧线的机器鱼自主轨迹评估研究中探究的机器鱼运动模态示意图
(图片引用自原论文)