English
首页
科研团队
学术科研
新闻公告
课程教学
竞赛
招生招聘
联系我们
首页
科研团队
实验室概况
实验室主任
成员
毕业生
学术科研
科研方向
科研项目
科研奖励
学术论文
学术讲座
学术活动
科研视频
新闻公告
图文亮点
科研动态
媒体报道
公告信息
燕园生活
课程教学
本科生课程
研究生课程
大学选课与就业
北大学堂直播课
竞赛
国际先进机器人及仿真技术大赛
招生招聘
硕/博士研究生招生
本科生科研
访问学者/学生
博士后招聘
联系我们
新闻公告
图文亮点
科研动态
媒体报道
公告信息
燕园生活
图文亮点
当前位置:
首页
>
新闻公告
>
图文亮点
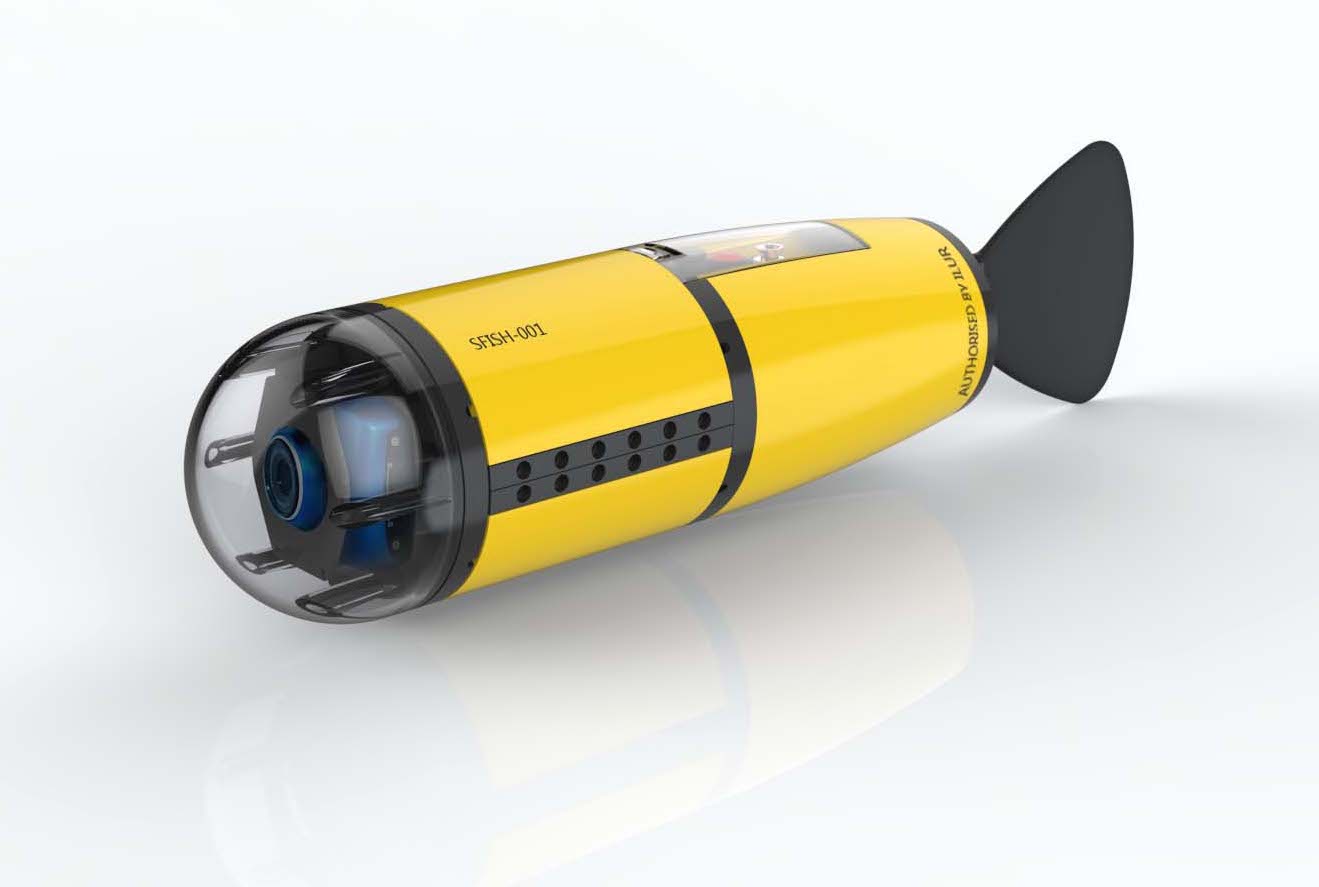
Robo-Shark水下机器人
Robo-Shark水下机器人,以鲨鱼为原型,采用多关节尾鳍驱动,其外壳为吸音材料,在降低设备运行功耗及水下噪声的同时,适合长时间水中游弋,可广泛应用于水下侦测、测绘等领域。同时因其所采用的仿生尾鳍驱动技术,使它的能量转换率大大高于螺旋桨动力,具备非常可观的续航里程。
单关节机器鱼
单关节机器鱼是模仿自然界中真实鱼类尾鳍摆动模式,其各组件采用模块化设计,具备防水功能。其运动模式包括基于仿生尾鳍推进的自由游动和基于WiFi网络的APP无线遥控运动。
仿生锦鲤
仿生锦鲤是由北京大学智能仿生设计实验室研发的仿鲹科三关节机器鱼。
<<
第一页
<
上一页
2
/2
下一页
> >
最后页
>> 跳转到
1
2
页




 图文亮点
图文亮点